宇宙探査機
地球を離れ、遥か先の宇宙空間を旅しながら私たちに多くの写真やデータを教えてくれる世界の宇宙探査機を解説しています。宇宙探査機とはどういう機械で、それで何を見てくるのか、高度な技術と工夫を結集した最先端の宇宙ロボットの世界をお楽しみください。
- 小惑星探査機はやぶさ2
- 彗星探査機ロゼッタ・フィラエ
- 火星探査車キュリオシティ
- 太陽探査機ユリシーズ
- 冥王星探査機ニューホライズンズ
地球観測・気象衛星
私達の生活において気象予報や地球観測は欠かせません。明日の天気から災害への対策・状況把握、さらに地球全体の気候変動や資源、植物の分布に至るまで、日々の生活から地球の全てを見守ってくれている人工衛星です。
- 気象衛星ひまわり8号/9号
ロケット・スペースプレーン
人工衛星や惑星探査機を宇宙へと送り出すロケットや、翼を持ち地球を往復するスペースプレーンは宇宙への入口とも言える輸送システムです。
- 無人スペースプレーンIXV

より安全で、より高性能で使いやすい原子力エネルギーは次世代の原子力発電のみならず、宇宙開発のほか様々な産業や技術に応用することもできます。原子力が持つ強大で安定したエネルギーとその利用の仕組みを解説しています。
原子力と放射線の基礎
- 核エネルギーの基礎原子力と放射線
宇宙開発と原子力
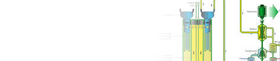
- 宇宙を行く原子炉宇宙用原子炉(宇宙炉)

- 放射性物質を利用した電源原子力電池
次世代炉と核燃料サイクル
- 核燃料を安全かつ使いやすく核燃料技術
- もんじゅって何だろう?高速増殖炉
- 新しい液体金属冷却炉鉛ビスマス高速炉
- 「核のゴミ」をの捨て方放射性廃棄物の処理

原子力の研究
- 原子炉開発の歴史いろいろな原子炉
- 核物質の特異な性質核物質の物性
核融合
- 未来のエネルギー核融合って何?
- 超高温のプラズマを利用する磁場閉じ込め核融合炉
- 一瞬の高エネルギーを利用する慣性閉じ込め核融合炉

大量破壊兵器として人類史上最大級の破壊力をもたらす核兵器の技術的な解説です。軍事目的の核兵器は、その仕組みも構造も平和目的の原子力発電等とは大きく異なります。その実態に迫ってみました。
核兵器の構造と製造
- 核融合兵器水素爆弾のしくみ
- ソ連に渡った「原爆の秘密」ローゼンバーグ事件
様々な核兵器
- 放射線強化型核兵器中性子爆弾
- 弾道弾迎撃ミサイル用核兵器X線強化弾頭「W71」
核実験
- 宇宙核実験アルガス作戦
その他
鉄道や艦船の写真など、その他の個人的な趣味のコーナーです。
鉄道
- 鉄道写真事業用車
現代艦艇
- イギリス海軍揚陸艦「アルビオン」
イオンエンジンを用いて小惑星へと接近した「はやぶさ2」はカメラや分光計を用いた観測を行い、その後着陸を実施します。この際に小惑星のサンプル採取などを行います。その接近と着陸はどのように行われるのでしょうか。
地上からのコントロール(GCP-NAV)
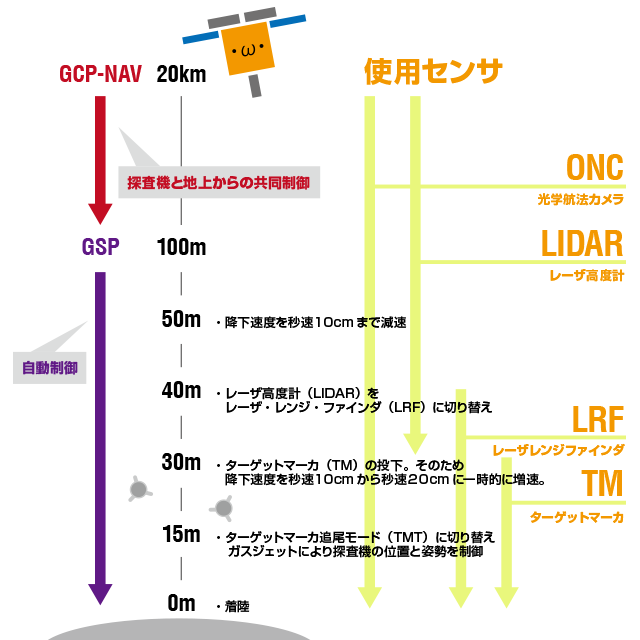
「はやぶさ2」はまず小惑星上空20kmのホームポジションと呼ばれる位置で待機しています。ここから光学航法カメラ(ONC)とレーザ高度計(LIDAR)を用いながら高度数百メートルの高さまでゆっくりと接近していきますが、この際には「はやぶさ2」が撮影した画像をまず地球へ伝送します。この時に画像と、あらかじめ得られた小惑星のデータから作成したCGモデルとを比較し、そこから「はやぶさ2」と小惑星の位置関係や姿勢を割り出します。
小惑星と「はやぶさ2」の位置関係から小惑星に近づくのに必要なエンジンの噴射量を地上で計算した上で「はやぶさ2」に指令として送信し、遠隔操作を行います。これは複雑な画像を認識したり、瞬間的な状況判断においては「はやぶさ2」のコンピュータよりも人間の方が優れている事から行われる航法です。
自動航法モード(GSP)
このモードは小惑星上空100メートルから下へ降下する際に用いられます。使用するセンサは引き続き光学航法カメラ(ONC)とレーザ光時計(LIDAR)を用いますが、40メートル未満に接近した際には、レーザ高度計(LIDAR)はその役割をレーザ・レンジ・ファインダ(LRF)へと切り替え、さらにターゲットマーカ(TM)とフラッシュランプ(FLA)を用いた着陸の誘導を行います。
地球から遠く離れた小惑星に居る「はやぶさ2」を地上から細かく制御するには、電波の到達時間などの問題などがあります。そのため精密な着陸の誘導は探査機自身がセンサからの情報を元に行う必要があるのです。
まずセンサで得られたデータを元に「はやぶさ2」が自分で考えて実行する行動のパターンを作成します。自律判断の基準とするもの、例えばどういった状況の場合に自ら危険と判断させるか、といった内容はあらかじめ観測したデータを元に決定されるのです。その「はやぶさ2」の行動基準を地上から指令した上で、「はやぶさ2」は自律制御により小惑星への着陸を実行します。その指令は通信が可能な容量や「はやぶさ2」に搭載されたメモリの容量の制約があるため、できるだけ効率的に行えるようにした仕組みが必要となります。
ピンポイント・タッチダウン
小惑星の上空、数十メートルまで接近した「はやぶさ2」はターゲットマーカ(TM)と呼ばれる着陸用の目印を投下します。これは光をよく反射するお手玉のようなものです。お手玉は中に細かい粒状の小豆などが入っており、それが衝撃を吸収することで投げてもバウンドしにくいようになっています。ターゲットマーカは同じような構造を持つことで、重力の小さい小惑星でも狙った場所にしっかり落とせるようになっています。
表面は反射材で覆われているため「はやぶさ2」に搭載されたフラッシュランプ(FLA)の光をよく反射します。そのため、フラッシュランプを使った撮影と、使わない撮影を行う事でその差からターゲットマーカの位置を知ることができます。このターゲットマーカを言わば灯台のようにしてレーザ・レンジ・ファインダ(LRF)も併用しながら「はやぶさ2」は着陸を行うのです。ターゲットマーカは複数利用することでそれを足がかりとし、より高精度に着陸を行えるため、初代「はやぶさ」では3つ持っていったターゲットマーカを、「はやぶさ2」では5つにまで増やしています。
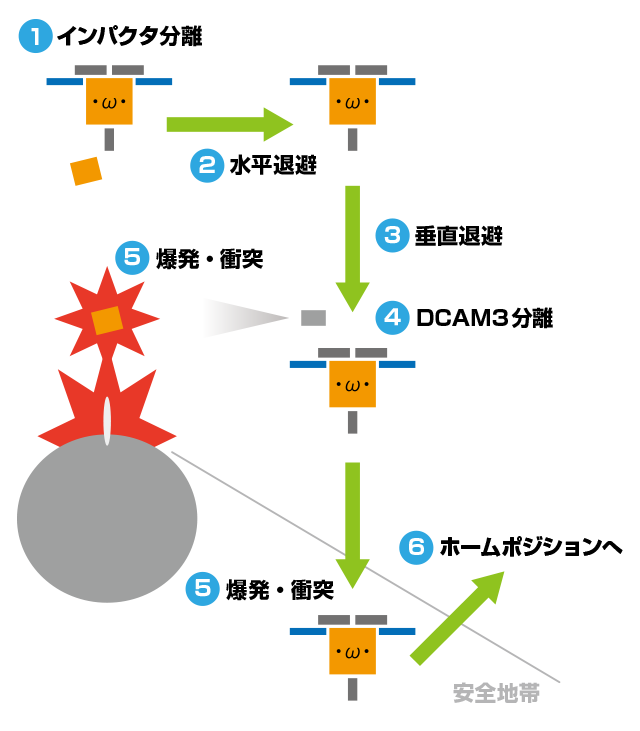
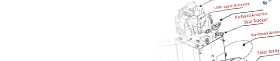
衝突装置「インパクタ」(SCI)の運用
「はやぶさ2」の大きな特徴としてこの「インパクタ」と呼ばれる衝突装置を持っていることが挙げられます。これは爆薬によってライナと呼ばれる金属板を針状に変形させ、メタルジェットと呼ばれるそれを超高速で射出して対象に衝突させるというものです。
このインパクタにより小惑星に人工クレータを作り出し、宇宙風化と呼ばれる太陽光や宇宙放射線などの影響を殆ど受けていない地下深くの新鮮なサンプルを採取することができます。
インパクタの運用にあたっては「はやぶさ2」から分離された後、「はやぶさ2」は安全地帯となる小惑星の影へと隠れます。これにより爆発や衝突などで生じた破片などが「はやぶさ2」に衝突することを防ぎます。
「はやぶさ2」から切り離されたインパクタはタイマー回路で起爆します。そして形成されたメタルジェットが小惑星に衝突するわけですが、この決定的瞬間を撮影しようと思っても「はやぶさ2」は小惑星の影に隠れてしまっています。
そのため、「はやぶさ2」は小惑星の影に隠れてしまう前に「DCAM3」と呼ばれる小型のカメラを切り離します。このカメラは、アナログカメラとデジタルカメラの2つが搭載されており、「はやぶさ2」に代わってインパクタ衝突の瞬間を捉えます。捉えた映像は電波によって「はやぶさ2」へと送信され、「はやぶさ2」上面のアンテナによって受信されます。このカメラはソーラーセイル実証機「IKAROS」に搭載されていた「DCAM-1/2」の後継でもあります。
インパクタによって人工クレーターが作られた後は飛び散ったダストが落ち着くのを待って、ホームポジションへと戻り、「DCAM3」などから得られた画像を元に人工クレーターの形成された場所を特定し、そこからのサンプル採取を目指します。