
宇宙探査機
地球を離れ、遥か先の宇宙空間を旅しながら私たちに多くの写真やデータを教えてくれる世界の宇宙探査機を解説しています。宇宙探査機とはどういう機械で、それで何を見てくるのか、高度な技術と工夫を結集した最先端の宇宙ロボットの世界をお楽しみください。
- 小惑星探査機はやぶさ2
- 彗星探査機ロゼッタ・フィラエ
- 火星探査車キュリオシティ
- 太陽探査機ユリシーズ
- 冥王星探査機ニューホライズンズ
地球観測・気象衛星
私達の生活において気象予報や地球観測は欠かせません。明日の天気から災害への対策・状況把握、さらに地球全体の気候変動や資源、植物の分布に至るまで、日々の生活から地球の全てを見守ってくれている人工衛星です。
- 気象衛星ひまわり8号/9号
ロケット・スペースプレーン
人工衛星や惑星探査機を宇宙へと送り出すロケットや、翼を持ち地球を往復するスペースプレーンは宇宙への入口とも言える輸送システムです。
- 無人スペースプレーンIXV

より安全で、より高性能で使いやすい原子力エネルギーは次世代の原子力発電のみならず、宇宙開発のほか様々な産業や技術に応用することもできます。原子力が持つ強大で安定したエネルギーとその利用の仕組みを解説しています。
原子力と放射線の基礎
- 核エネルギーの基礎原子力と放射線
宇宙開発と原子力
- 宇宙を行く原子炉宇宙用原子炉(宇宙炉)

- 放射性物質を利用した電源原子力電池
次世代炉と核燃料サイクル
- 核燃料を安全かつ使いやすく核燃料技術
- もんじゅって何だろう?高速増殖炉
- 新しい液体金属冷却炉鉛ビスマス高速炉
- 「核のゴミ」をの捨て方放射性廃棄物の処理

原子力の研究
- 原子炉開発の歴史いろいろな原子炉
- 核物質の特異な性質核物質の物性
核融合
- 未来のエネルギー核融合って何?
- 超高温のプラズマを利用する磁場閉じ込め核融合炉
- 一瞬の高エネルギーを利用する慣性閉じ込め核融合炉

大量破壊兵器として人類史上最大級の破壊力をもたらす核兵器の技術的な解説です。軍事目的の核兵器は、その仕組みも構造も平和目的の原子力発電等とは大きく異なります。その実態に迫ってみました。
核兵器の構造と製造
- 核融合兵器水素爆弾のしくみ
- ソ連に渡った「原爆の秘密」ローゼンバーグ事件
様々な核兵器
- 放射線強化型核兵器中性子爆弾
- 弾道弾迎撃ミサイル用核兵器X線強化弾頭「W71」
核実験
- 宇宙核実験アルガス作戦
その他
鉄道や艦船の写真など、その他の個人的な趣味のコーナーです。
鉄道
- 鉄道写真事業用車
現代艦艇
- イギリス海軍揚陸艦「アルビオン」

(Credit:ESA)
スペースプレーンと言えば翼を持つ宇宙船、有翼機として知られていますが、「IXV」は有翼機でありながら翼が無いという特徴的な宇宙船ででもあります。
(Credit:ESA)
ESAは将来の打ち上げ機構想としてFFLP(Future Launchers Preparatory Programme)と呼ばれる計画があります。この中で再使用型宇宙機の検証として「IXV」の計画が持ち上がりました。「IXV」は過去に成功した大気圏再突入デモンストレータ「ARD」の成果を反映しつつ、それまで研究が行われていたフランスCNESの「Pre-X」と、ESAの「AREV」を統合、継承する形となりました。
「Pre-X」はどうやら日本の宇宙科学研究所でもかつて何らかの試験が行われていたようで、過去の宇宙科学研究所の特別公開の際に試験に用いられたと思われるモックアップを目にすることができました。
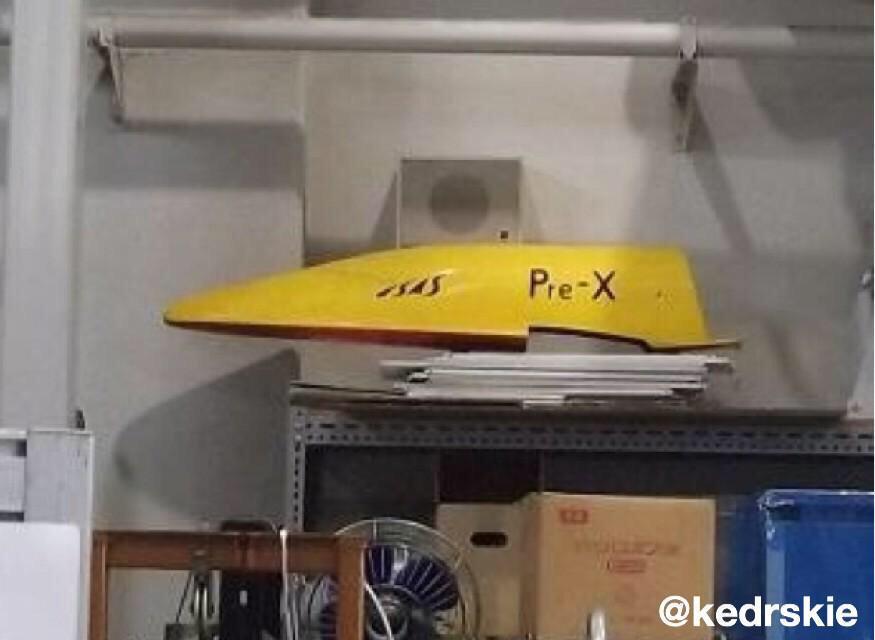
(写真:ケドルスキー様)
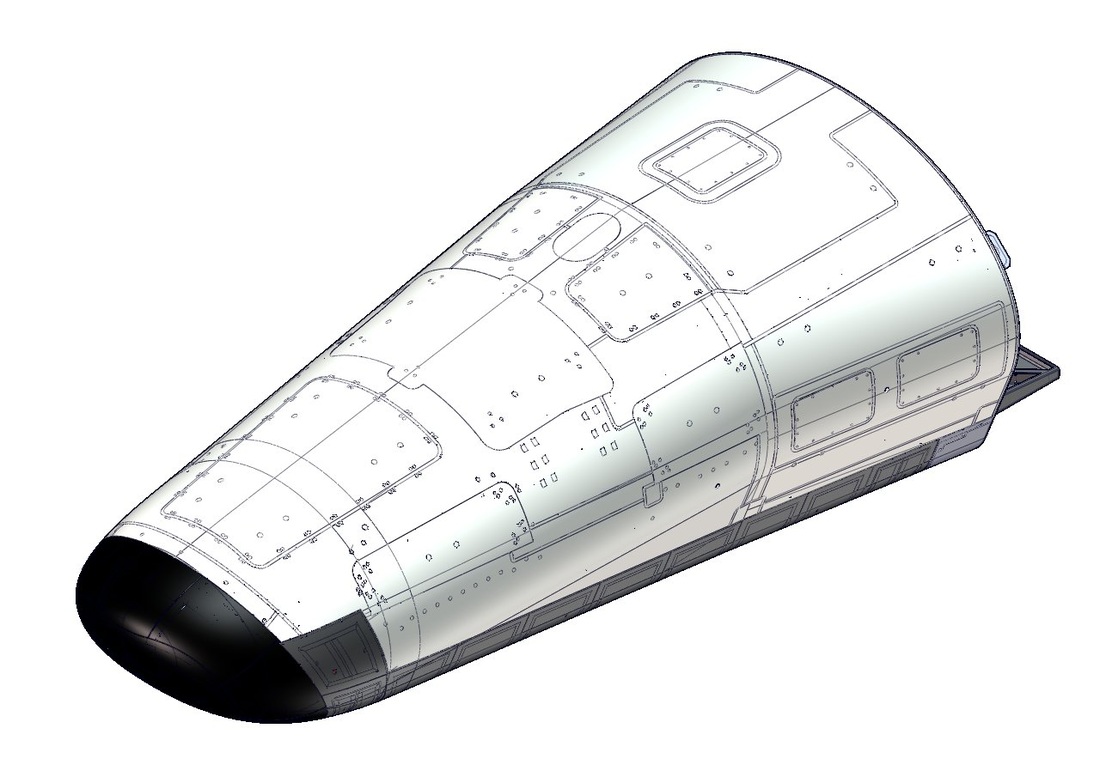
「IXV」の外観で最も特徴的なのは流線型の有翼機でありつつ、主翼が無いという事にあります。これは胴体のみで揚力を生み出すリフティングボディを採用しているためで、こうした機体は過去にもNASAがX-33を計画するなどしていました。「IXV」ではこのリフティングボディによる大気圏再突入時の空力制御技術(ATD)や熱制御技術(TPS)、誘導制御技術(GNC)の研究を目的としています。

(Credit:ESA)
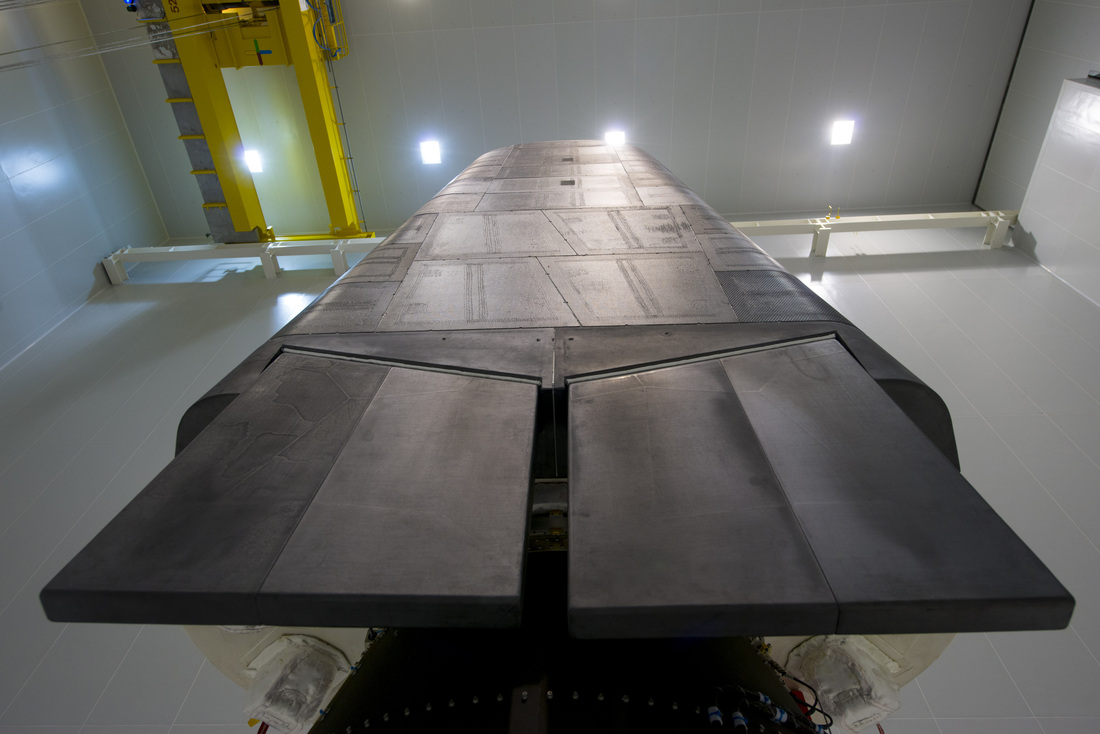
構体系
大きさは全長約5メートル、全幅2.2メートル、高さ1.5メートルで、打ち上げ時の重量は1845キログラムと比較的小型の宇宙船です。内部は複数のアセンブリに分割され、大気圏再突入した際に宇宙船を保護するための耐熱セラミックとアブレータによって構成されています。構体は打ち上げから飛行、大気圏再突入、着水まで耐えられるように炭素繊維強化ポリマーによって造られており、機体下部はアルミナとシリカによる軽量断熱材と、セラミック繊維のC-Si-C耐熱パネルで構成されています。また、機体前方は炭化ケイ素を耐熱素材として用いています。
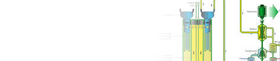
電源や通信機器、測定装置、制御装置などで構成されるアヴィオニクス部分、減速用パラシュートとフロート、空力制御用のフラップとその駆動装置、推進・姿勢制御用の化学スラスタとその制御装置などで構成されています。
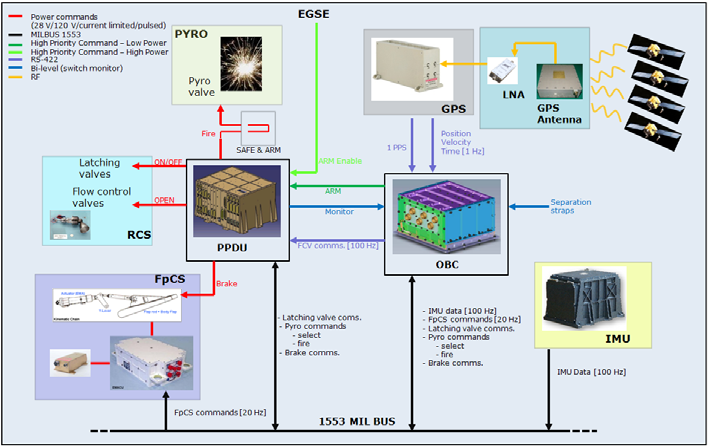
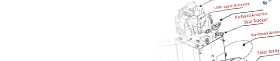
「IXV」のシステム構成図(Credit:ESA/Alenia)
電源系
電源サブシステム(EPS)は宇宙船に必要な電力を供給しています。電源はそれぞれが冗長化された2セットのリチウムイオンバッテリーを用い、電源制御装置であるPPDUを介して28ボルトの電力を供給しています。慣性計測装置(IMU)「クエーサー3000」は55ボルトの電力を必要とするため、これはPPDUからDC/DCコンバータを介して供給されています。
データハンドリング系
データハンドリングサブシステム(DHS)は、宇宙船のコマンド・テレメトリ用と、飛行実験におけるデータ収集用の2つに分けられます。フライトソフトウェアを実行してミッション全体の制御を行うオンボードコンピュータ(OBC)にはクロック周波数50MHzの耐放射線マイクロプロセッサ「LEON2-FT」が用いられています。それぞれの機器とのデータのやりとりにはMIL-STD-1553とRS-422を組み合わせて使用しています。各種の測定・収集されたデータは24GBの容量を持つ2つのフラッシュメモリに記録されます。
宇宙船の誘導にはリニア加速度計とリングレーザージャイロを搭載いた慣性計測装置「クエーサー3000」とGPSによって行われます。
姿勢制御系
飛行制御に用いられるのは400ニュートンの推力を持つスラスタと、機体尾部の2つのフラップです。スタスタは一液式のエアバス製でアリアン5の上段で使用されているものと同一のものです。噴射を続ける定常モードと短時間噴射を行うパルスモードを使い分けることで細かな姿勢制御から軌道制御まで幅広く行うことができます。大気圏再突入時にはフラップと併用することでより正確な飛行制御を行えます。

400ニュートンの推力を持つ一液式スラスタ(Credit:ESA)
機体尾部の2つのフラップは大気圏再突入時に用いられます。オンボードコンピュータからの指令を制御装置(EMACU)が受け取り、電磁アクチュエータを駆動させるという仕組みです。電磁アクチュエータは大きな電力を必要とするため、2つのバッテリーを並列させて使用します。
(Credit:ESA)
空力制御用のフラップ(Credit:ESA)
パラシュートと着水
大気圏に再突入した「IXV」はパラシュートによる減速を経て着水しますが、あくまでも再突入実験が目的の機体であるためパラシュートは既存のものを流用して使用しています。
最初に展開される直径1.7メートルの「パイロットシュート」はNASAの火星探査機に用いられらたものを利用し、パイロットシュートは2秒以内に直径4.3メートルの「超音速ドローグシュート」を引き出して展開します。この「超音速ドローグシュート」はF-117ステルス攻撃機のエアロブレーキに使用されていたものを流用しています。
「超音速ドローグシュート」によりある程度減速すると次に直径7.3メートルの「亜音速ドローグシュート」が展開されます。このパラシュートはF-111戦闘爆撃機の脱出カプセルに使用されていたものを流用しています。
最後に直径30メートルの「メインパラシュート」が展開されますが、これもNASAの火星探査車「キュリオシティ」の地球上での降下試験に用いられたものを流用しています。
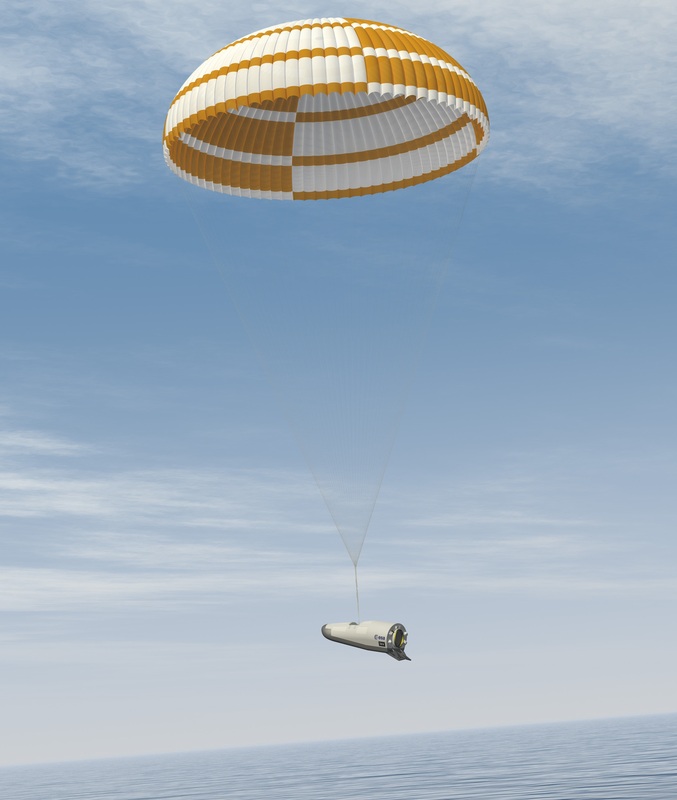
降下する「IXV」(Credit:ESA)
着水するとエアバッグのようにフロートが4つ展開し、船から回収ができるように海上を漂わせることができます。
12日にヴェガロケットにより打ち上げられた「IXV」は無事に100分間の弾道飛行を行い、無事に着水・回収するに至りました。

「IXV」の打ち上げ(Credit:ESA)

着水した「IXV」(Credit:ESA)
今後の無人スペースプレーン
ESAは「IXV」の発展型として「PRIDE」を計画しています。これは大型化に伴って主翼が追加され、さらに地上への着陸を可能にする降着装置が追加されます。さらに太陽電池パドルが追加されることで軌道上での長期間のミッションを可能にすると思われます。
「PRIDE」は現在アメリカ空軍が運用している無人スペースプレーン「X-37B」と似たものになる模様です。「X-37B」は軍事ミッションを主な目的としており、これまで複数回行われた長期間の飛行ミッションもその全容は明らかにされていません。一説には軌道上での衛星搭載機器の試験などを行うテストベッドとしての役割があるのではないかと考えられています。


「X-37B」と「IXV」(Credit:USAF/ESA)

軌道上ミッションを行う「PRIDE」の想像図(Credit:ESA)
さらにこうした無人スペースプレーンとしては中国の「神龍(シェンロン)」や、インドの「AVATAR」など各国で開発が相次ぐ中、ESAの「PRIDE」がどのようなミッションを実現してくれるのかとても楽しみです。

中国のH-6K爆撃機に吊り下げられた「神龍」
アメリカのスペースシャトルはその運用コストも高く、引退後はカプセル型の往還機開発が脚光を浴びていますが、一方でこうした小型で無人の有翼機の開発も盛んになっています。
さらにアメリカのSPACE-X社がファルコン9の一段目の再使用化の実験を行うなど、さまざまな形で行われる再使用型宇宙機の開発には目が離せませんね!ヽ(=´▽`=)ノ
 原子力や宇宙開発に関する同人誌を発行しております。
原子力や宇宙開発に関する同人誌を発行しております。