
宇宙探査機
地球を離れ、遥か先の宇宙空間を旅しながら私たちに多くの写真やデータを教えてくれる世界の宇宙探査機を解説しています。宇宙探査機とはどういう機械で、それで何を見てくるのか、高度な技術と工夫を結集した最先端の宇宙ロボットの世界をお楽しみください。
- 小惑星探査機はやぶさ2
- 彗星探査機ロゼッタ・フィラエ
- 火星探査車キュリオシティ
- 太陽探査機ユリシーズ
- 冥王星探査機ニューホライズンズ
地球観測・気象衛星
私達の生活において気象予報や地球観測は欠かせません。明日の天気から災害への対策・状況把握、さらに地球全体の気候変動や資源、植物の分布に至るまで、日々の生活から地球の全てを見守ってくれている人工衛星です。
- 気象衛星ひまわり8号/9号
ロケット・スペースプレーン
人工衛星や惑星探査機を宇宙へと送り出すロケットや、翼を持ち地球を往復するスペースプレーンは宇宙への入口とも言える輸送システムです。
- 無人スペースプレーンIXV

より安全で、より高性能で使いやすい原子力エネルギーは次世代の原子力発電のみならず、宇宙開発のほか様々な産業や技術に応用することもできます。原子力が持つ強大で安定したエネルギーとその利用の仕組みを解説しています。
原子力と放射線の基礎
- 核エネルギーの基礎原子力と放射線
宇宙開発と原子力
- 宇宙を行く原子炉宇宙用原子炉(宇宙炉)

- 放射性物質を利用した電源原子力電池
次世代炉と核燃料サイクル
- 核燃料を安全かつ使いやすく核燃料技術
- もんじゅって何だろう?高速増殖炉
- 新しい液体金属冷却炉鉛ビスマス高速炉
- 「核のゴミ」をの捨て方放射性廃棄物の処理

原子力の研究
- 原子炉開発の歴史いろいろな原子炉
- 核物質の特異な性質核物質の物性
核融合
- 未来のエネルギー核融合って何?
- 超高温のプラズマを利用する磁場閉じ込め核融合炉
- 一瞬の高エネルギーを利用する慣性閉じ込め核融合炉

大量破壊兵器として人類史上最大級の破壊力をもたらす核兵器の技術的な解説です。軍事目的の核兵器は、その仕組みも構造も平和目的の原子力発電等とは大きく異なります。その実態に迫ってみました。
核兵器の構造と製造
- 核融合兵器水素爆弾のしくみ
- ソ連に渡った「原爆の秘密」ローゼンバーグ事件
様々な核兵器
- 放射線強化型核兵器中性子爆弾
- 弾道弾迎撃ミサイル用核兵器X線強化弾頭「W71」
核実験
- 宇宙核実験アルガス作戦
その他
鉄道や艦船の写真など、その他の個人的な趣味のコーナーです。
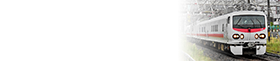
鉄道
- 鉄道写真事業用車
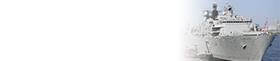
現代艦艇
- イギリス海軍揚陸艦「アルビオン」
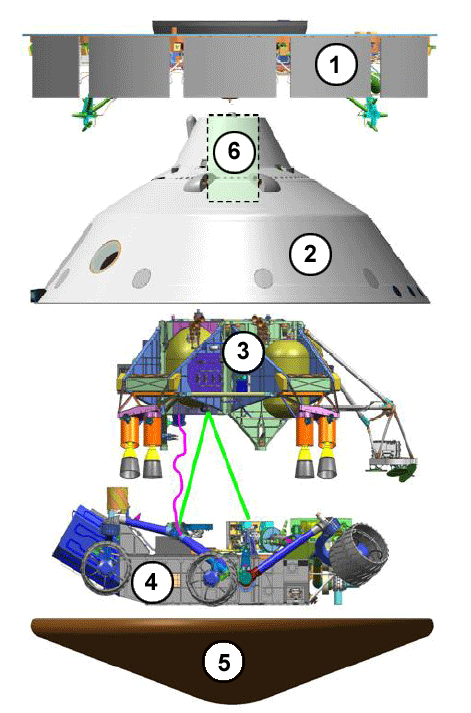
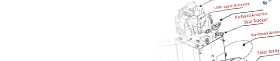
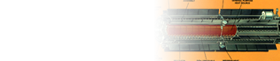
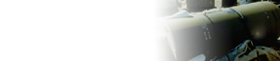
①クルーズステージ、②背面ヒートシールド、
③降下ステージ(PDS)、④キュリオシティ本体、
⑤前面ヒートシールド、⑥減速パラシュート
(Credit:NASA)
地球から火星へ207日かけて5億6700万kmの距離を旅したキュリオシティはその大気圏へ突入する段階へと進みます。この時の地球と火星の距離では電波の速さでも13分以上かかってしまいます。キュリオシティから突入シーケンス開始の電波を地球で受け取っている頃には、火星では既に結果は決まってしまっているというわけです。そのため着陸は全てプログラム通りに、コンピュータによる完全自律制御で行われます。
火星の大気は非常に希薄で地球と比較すると約0.75%しかありません。しかし超高速で飛行する探査機を破壊してしまうには十分な大気でもあります。そのためキュリオシティは前部ヒートシールドと後部シェルでしっかりと保護された状態で大気圏へ突入します。
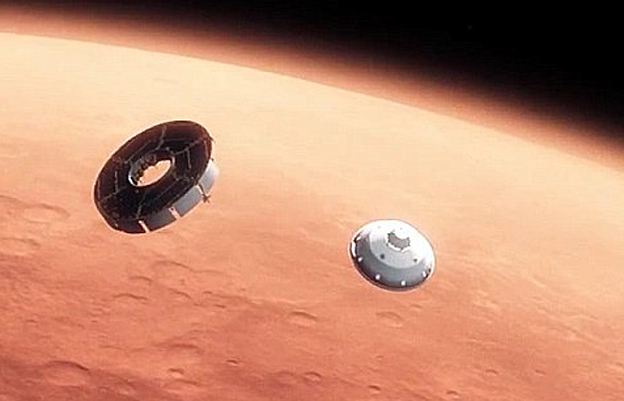
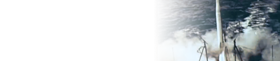
航行ステージを切り離し
大気圏突入を行うキュリオシティ
(Credit:NASA)
火星へと向かう軌道で何度か行う軌道修正(TCM)の噴射やシェルに覆われているキュリオシティとの通信を行ってきたクルーズステージの分離を大気圏突入10分前に行います。10個の火工品に点火し、切り離されたクルーズステージは、そのままカプセルとほぼ同じ軌道で火星大気圏へ突入し、燃え尽きます。このクルーズステージの分離時に限らず、機体から分離するものは基本的に火工品に点火する事で行われます。クルーズステージ分離の30秒後、通信システムがEDL通信に移行し、Xバンド通信でトーン通信を行い、UHF通信で火星周回機「マーズ・オデッセイ」を中継して8kbpsのテレメトリ通信を開始します。
大気圏突入9分前、クルーズステージ分離後は毎分2回転(2prm)のスピン安定からデスピン・マニューバを行い、三軸安定で適切な突入角度を維持します。この時突入時の熱や圧力を計測するためのMEDLI装置が作動し、データがキュリオシティのメインコンピュータ(RCE)で記録され始めます。
突入5分49秒前に「クルーズバランスマス・デバイス」と呼ばれるタングステン製の75kgのバラスト(重り)を2つ分離します。これによって重心位置を変え、突入の誘導に航空機のように突入カプセル自体の揚力を利用する「リフティングボディ・エントリー」を行えるようになります。
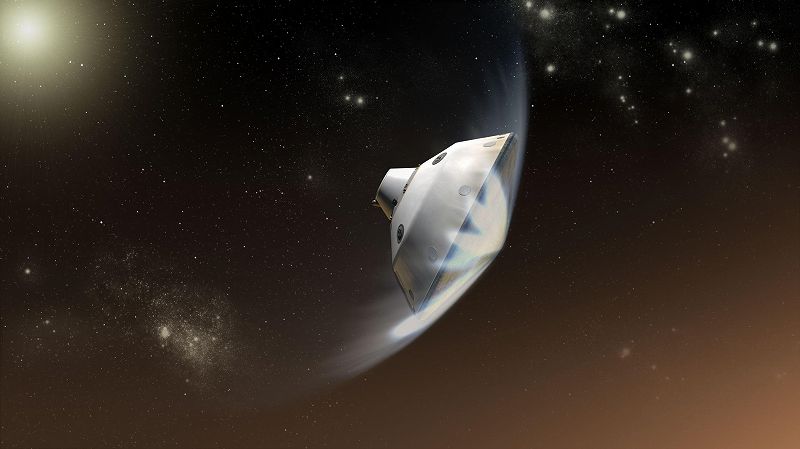
火星大気圏へ突入するキュリオシティ(Credit:NASA)
突入時の速度は5.9km/s、時速にして21万kmもの速度です。この時、後部シールドの4箇所に配置されている米エアロジェット社製の一基あたり30kgの出力を持つ「MR-107U」一液ヒドラジンスラスタ8基で軌道を調整しながら誘導突入、「ガイデッド・エントリ」を行います。軌道修正を行いながら機体をS字に左へ右へと蛇行させつつ、パラシュートを展開できる速度まで減速します。極超音速からの誘導突入技術によって着陸予定地点への誤差を約6.4km~25.7kmの楕円の範囲内に収める事ができます。
火星大気圏突入後、85秒で前面ヒートシールドの表面温度は2000℃以上にも達します。ヒートシールドにはフェノール樹脂含浸カーボンアブレータ、PICA(Phenolic Impregnated Carbon Ablator)が採用されています。これは90年代にNASAのエイムズ研究センターで開発されたもので、彗星探査機「スターダスト」の地球大気圏への再突入カプセルに使用されたのが最初です。113枚のタイルで構成され、隙間はスペースシャトルの耐熱タイルにも使用されたRTV-560常温硬化接着剤が充填されています。
1997年に火星に降り立ったマーズ・パスファインダの約7.3km/sに次いで高速な約6.1km/sで突入します。速度こそ多少は遅いもののキュリオシティを覆うエアロシェルの大きさはマーズ・パスファインダが直径2.65mだったのに対し、MSLは直径4.5mにもなる上、重量も遥かに重くなっています。そのため火星大気圏突入の際には乱流が発生する可能性があり、ヒートシールドの熱流束とせん断応力は過去最大となります。
そしてその10秒後に最大の、11Gにもなる減速加速度が加わります。キュリオシティの900kgの車体に加わる力は約10トンにも及びます。もし人間であれば多くの人は気絶してしまう程の加速度です。そして4分間に及ぶ誘導突入を終えるとパラシュート展開までに1つあたり25kgのクルーズバランスマス・デバイスを6つ分離し、重心位置を最初の位置に戻します。
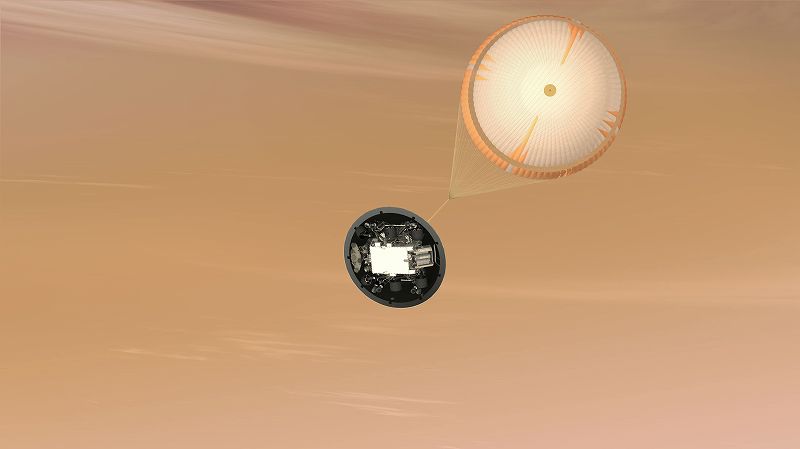
パラシュートを展開し、前面ヒートシールドを切り離す
(Credit:NASA)
突入から254秒後、高度が約11km、速度も約405m/sになると直径約16メートル、全長約50メートル以上、重量にして約60kgの超音速パラシュートがダイナマイトで射出され展開されます。この時には約30トンもの力が加わることになります。その展開時にはまるで夏の打ち上げ花火のような大きな音が周囲に響いていた事でしょう。大気圏突入時の不測の事態に備えて、マッハ1.8~2.2の間でも展開できるよう設計されています。パラシュートとカプセルを繋ぐ80本ものサスペンションコードには日本の帝人テクノプロダクツが開発したパラ系アラミド繊維のテクノーラが使用されました。展開されたこのパラシュートによる減速、「パラシュート・ディセント」で運動エネルギーの95%を失わせ、亜音速以下まで減速することができます。しかし大気が薄いためにこのパラシュートのみでの減速では不十分であるため、後述の降下ステージ(PDS:Powered Descent Vehicle)のロケットエンジンを使用した減速、「パワード・ディセント」が必要となります。
パラシュート展開から約24秒後、前面ヒートシールドが分離されます。この時キュリオシティは地球を出発して以来、はじめて陽の光を見ることになります。この時ヒートシールドと共にMEDLI装置がキュリオシティから切り離されるのとほぼ同時にMARDIカメラが作動して、着陸までの様子を撮影し続けます。そして8秒後にターミナル降下センサ(TDS:Terminal Descent Sensor)のレーダを用いて速度と高度の正確な計測を開始します。降下レーダは6つの独立したKaバンドのスロットアレイアンテナを用いたパルスドップラレーダを搭載しています。アンテナ素子は1つあたり748個のスロットを持っています。
前面ヒートシールドが分離されてから85秒後、高度約1.6km~2km、速度約120m/sの時点でカプセル後部のバックシェルは火工品を使用してパラシュートと一緒に切り離され、降下用ステージであるPDSと共にキュリオシティが放たれます。この時点での高度は1.6km、速度が約80m/sとなっています。バックシェルから切り離された直後、PDSとキュリオシティは自由落下状態となります。この時PDSの落下速度が一時的に125m/sまで増速することで、切り離したバックシェルとパラシュートに対して十分な安全距離を確保することができます。そして、PDSに搭載された米エアロジェット社製の着陸用ロケットエンジン(MLE:Mars Landing Engine)である「MR-80B」が1%出力(ニアシャットダウンレベル)で動作を開始します。このMR-80Bはヴァイキング計画で着陸に使用されたMR-80の発展改良型の一液式ヒドラジンエンジンです。通常スロットルレンジは400N~3600Nの推力を持ちます。
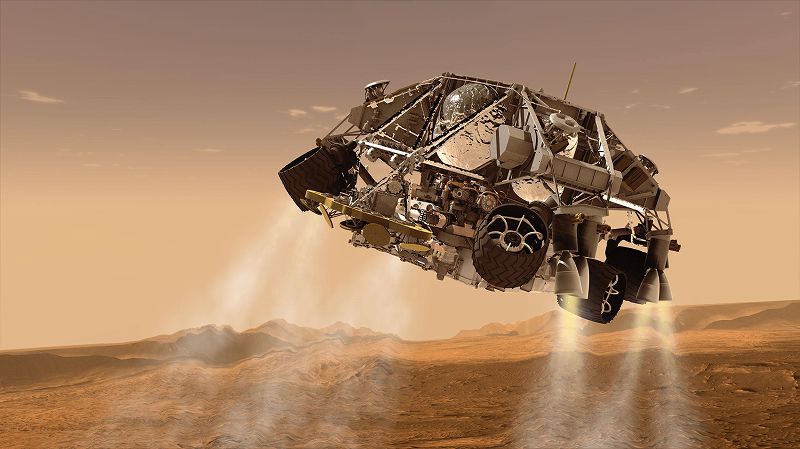
降下ステージのロケットエンジンによる減速(Credit:NASA)
切り離しから間もなく、MLEはフルスロットル、100%出力となります。その直後から姿勢制御が開始され、PDSはキュリオシティを着陸させるために適切な高度と速度を維持しつつ、切り離したバックシェルやパラシュートから十分に安全な距離を取ります。ロケットエンジンの噴射で速度と高度を低下させつつ、レーダで周囲を確認しながら降下を行います。このパワード・ディセントでは水平速度を0にし、降下速度を約20m/sまで下げます。そこからMLEの出力を最大90%まで絞りながら降下速度を0.75m/sまで下げます。高度が約20mになるとMLEの出力を下げる「スロットルダウン・シーケンス」が開始されます。
スロットルダウン・シーケンスの時点でPDSに搭載されていた390kgの燃料は半分ほどにまで減っていると推測されます。機体全体の重量が軽くなり、かつ速度もある程度落ちているため、推力重量比の関係で8つのエンジン出力を20~25%まで絞る必要がありますが、エンジンの出力は下げれば下げる程に燃費が著しく悪くなります。PDSはキュリオシティを着陸させた後に離脱機動を行う為の燃料を残しておく必要があるため、MLEは8つあるエンジンのうち半分の4つを停止して出力1%のニアシャットダウンレベルへ移行させます。残った4つのエンジンを約50%程にすることで、出力を下げつつも燃費の悪化を極力防いでいます。スロットルダウンシーケンスで降下速度は0.75m/sまで落とされます。そして高度が18.6mまで下がるといよいよキュリオシティをPDSからロープで吊り下げて着陸させるという「スカイクレーン・ランディング」が開始されます。
スカイクレーンはこれまでの探査車と比較して非常に重いキュリオシティを着陸させるために考案された方法です。これまではエアバッグが使用されてきましたが、キュリオシティは重すぎる為に使用することはできませんでした。一方ヴァイキング計画のようにロケットエンジンで減速させながらそのまま着陸させる方法ではロケットの噴射によって飛び散った岩石が精密なキュリオシティの機器を破損させてしまう可能性もあり、また着陸機から探査車を発進させる際のスロープもキュリオシティの重さから非常に頑丈にする必要もあるなどの問題がありました。そこで編み出されたスカイクレーンでは、上空を飛行するPDSからロープで探査車を吊り下げて降ろす事でロケット噴射の影響をできるだけ小さく抑え、また直接探査車を地面に降ろせる事からスロープ等も不要であるなどの利点から、始めてこのスカイクレーン・システムが採用されました。

スカイクレーンで吊り下げられるキュリオシティ
(Credit:NASA)
PDSは大気圏突入後約5分45秒後程で高度18.6kmで安定した飛行状態から火工品に点火、PDSとキュリオシティとの結合を解きます。キュリオシティはPDSの中央部から伸びる3本のワイヤロープに吊り下げられながら、その3秒後に折り畳まれていた6つの車輪が展開されます。そのまま75cm/sの降下速度でゆっくりと火星表面へと接近します。キュリオシティとPDSは3本のワイヤロープに加え、PDSが持つ熱電池からキュリオシティへの電力供給と、キュリオシティからPDSへのデータ送信を行うアンビリカルケーブルが接続されています。
キュリオシティはワイヤロープによって7秒ほどかけ、PDSから7.5メートル下に吊り下げられます。その時点で電磁ブレーキを利用して宙吊りの状態で停止します。その直後から「タッチダウン・ロジック」がオンになります。キュリオシティがいよいよ火星に接地すると、キュリオシティは地面で支持されるため、それまでワイヤロープにかかっていた荷重が一気に小さくなります。タッチダウン・ロジックによって着陸が検出されるとPDSは減速し、ワイヤロープの切断コマンドが実行され、火工品に点火してワイヤロープが切断されます。その直後にアンビリカルケーブルに対しても切断コマンドが実行され、即座に切断されます。
そしてキュリオシティとの全ての接続が切られたPDSは187ミリ秒の切断余裕時間の後、「フライアウェイ・モード」となり、ロケットエンジンを一気に100%の最大スロットルにしてキュリオシティの上から離脱してゆきます。探査車の直上に対して45度の角度で飛び去り、最低でも4秒程は燃焼を継続し、そのまま残存燃料を使い果たすとエンジンが切られます。そのままPDSはキュリオシティから少なくとも150メートル以上離れた場所に落ちるように設計されています。
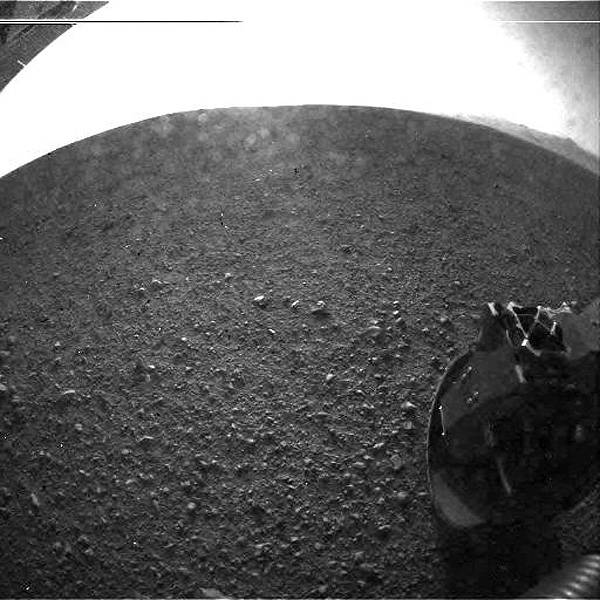
キュリオシティが初めて撮影した映像
(Credit:NASA)
極めて高速で非常にタイトな着陸から一転、着陸に成功したキュリオシティは落ち着いてゆっくりと異常が無いかチェックを行い、「EDLモード」から、火星0日目からの「Sol0モード」へと移行します。各温度センサと熱制御システムが動作し、Hazcam(危険回避カメラ)による撮影を行います。着陸から約12時間後にUHFアンテナから上空を通過する軌道周回機「マーズ・リコネッサンス・オービター」を中継して多くのテレメトリ・データが送信されます。展開されたリモートセンシングマスト(RSM)のNavcam(ナビゲーションカメラ)が空を撮影して太陽の位置の計算を行い、高利得アンテナ(HGA)を正確に地球に指向させます。地上では探査に向けた機器チェックの他、キュリオシティの周辺に危険が無い事などを確認します。
 原子力や宇宙開発に関する同人誌を発行しております。
原子力や宇宙開発に関する同人誌を発行しております。